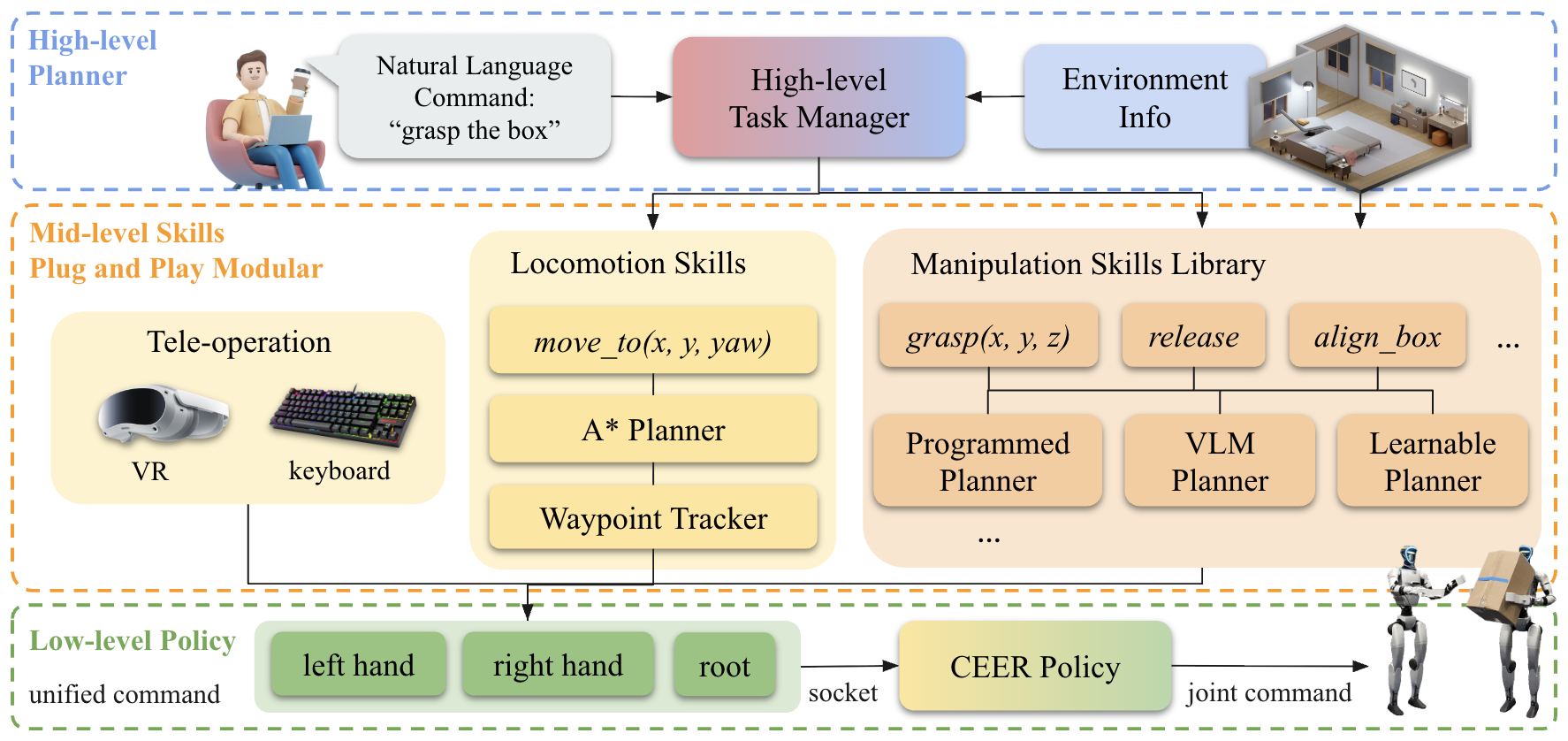
System Framework
Overview of the proposed three-layer hierarchical system. At the high level, a language instruction is interpreted by an LLM-based skill manager, which selects and composes mid-level skills based on environmental information. The mid-level consists of plug-and-play locomotion and manipulation modules that generate unified end-effector and root commands. At the low level, a unified CEER policy converts these commands into joint-space actions. This modular design decouples task reasoning, skill execution, and low-level control, enabling scalable and extensible system integration.
System Evaluation on Long-Horizon Tasks in a Room Scene
We evaluate the proposed three-layer hierarchical system in simulation on long-horizon household tasks. Under the unified end-effector and root control interface, tasks are decomposed into locomotion, manipulation invocation, and task completion. To focus on system-level capability and connectivity, we use a minimal skill set and a single grasp primitive across all tasks.
The simulated room contains a blue bed, a yellow table, and a green sofa. The videos below compare two control modes on the same four tasks: LLM-driven execution and human keyboard teleoperation.
For the human baseline, five participants perform the same tasks through keyboard teleoperation with the same control degrees of freedom as the robot. After a short practice period, each participant is given two attempts per task type, for a total of 40 trials. We record task success rate and completion time.
In keyboard teleoperation, W, S, A, and D control forward, backward, left, and right base velocity; Q and E control yaw rotation; I, K, J, and L control end-effector motion in the horizontal plane; and U and O move the end-effectors up and down along the vertical axis. The two end-effectors are controlled symmetrically with respect to the robot's sagittal plane.
LLM-Controlled Examples
Move the blue box to the middle of the yellow and red boxes
Move the blue box to the bed
Move the blue box to the sofa
Move the blue box to the bed, then move the red box to the bed
Keyboard-Controlled Examples
Move the blue box to the middle of the yellow and red boxes
Move the blue box to the bed
Move the blue box to the sofa
Move the blue box to the bed, then move the red box to the bed